
Install Steam
login
|
language
简体中文 (Simplified Chinese)
繁體中文 (Traditional Chinese)
日本語 (Japanese)
한국어 (Korean)
ไทย (Thai)
Български (Bulgarian)
Čeština (Czech)
Dansk (Danish)
Deutsch (German)
Español - España (Spanish - Spain)
Español - Latinoamérica (Spanish - Latin America)
Ελληνικά (Greek)
Français (French)
Italiano (Italian)
Bahasa Indonesia (Indonesian)
Magyar (Hungarian)
Nederlands (Dutch)
Norsk (Norwegian)
Polski (Polish)
Português (Portuguese - Portugal)
Português - Brasil (Portuguese - Brazil)
Română (Romanian)
Русский (Russian)
Suomi (Finnish)
Svenska (Swedish)
Türkçe (Turkish)
Tiếng Việt (Vietnamese)
Українська (Ukrainian)
Report a translation problem










Right, I did just read that on a forum post a couple of days ago, I think from one of the devs, 3 years ago.
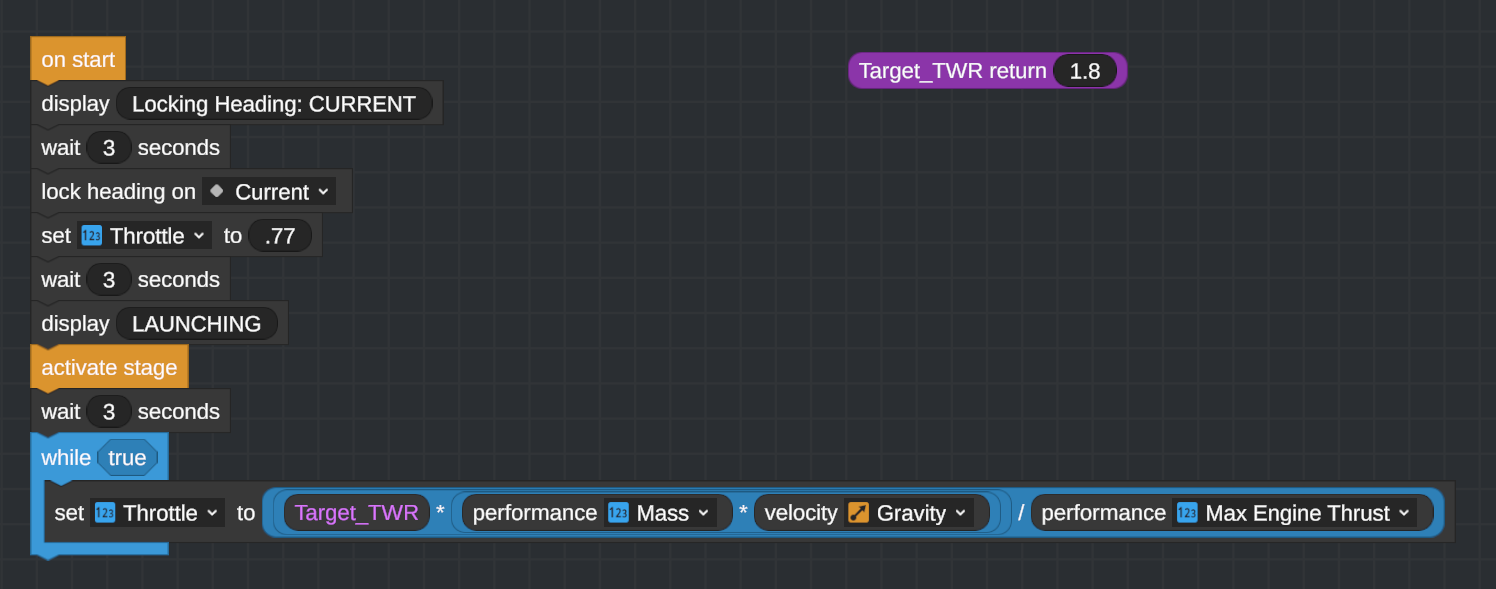
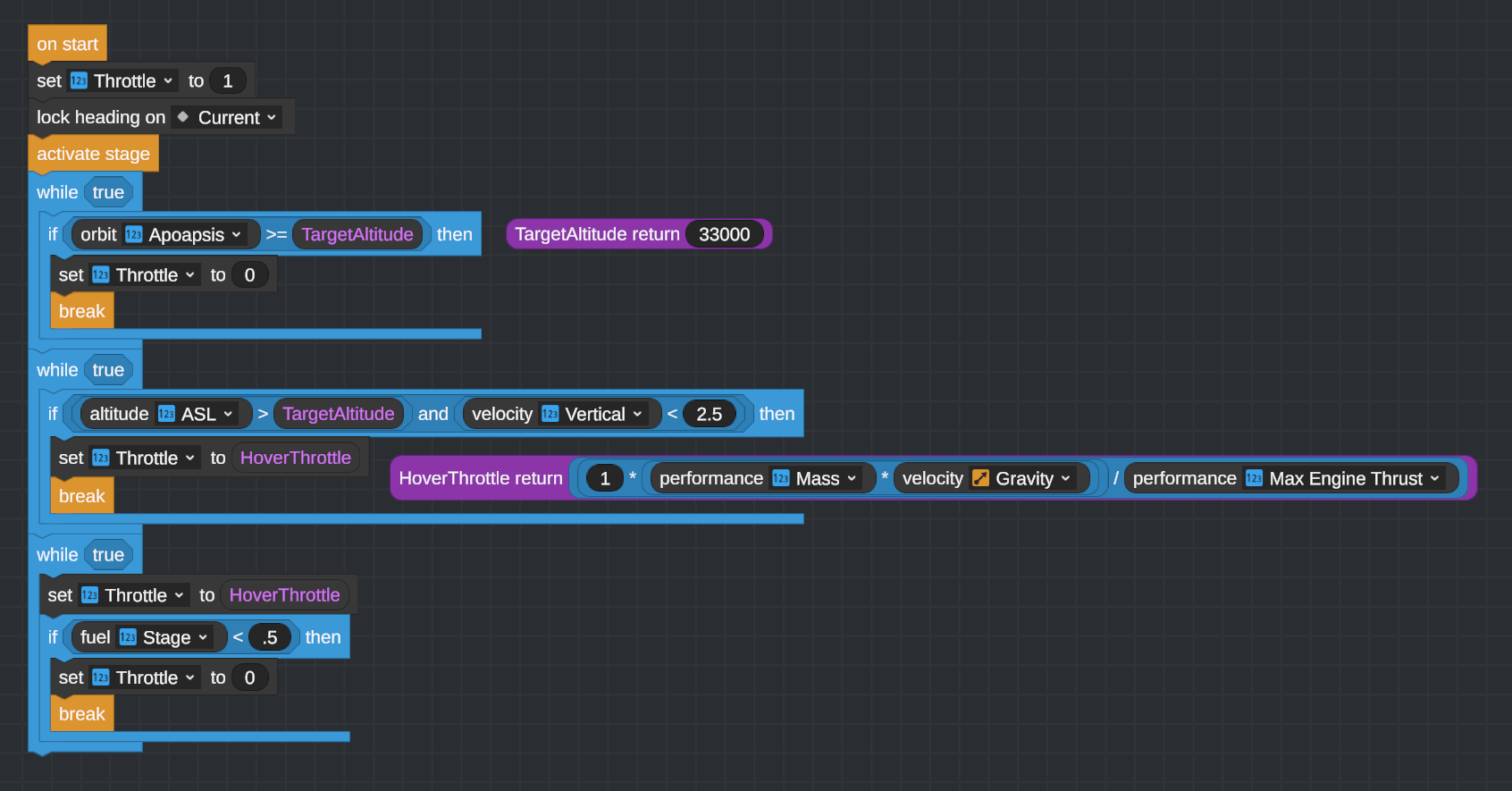
I might apply that to my scripts, I haven't really tested scenarios where the performance impact was noticeable at all, I've only tested single craft scenarios.
Also not sure if they have improved the implementation of Vizzy to just 'assume' the Wait 0 Seconds inside of infinite loops? But thank you for pointing it out, I will add a note on the guide to cover that!
While the way you are doing it does work, it requires more processor cycles -- potentially enough to noticeably reduce the frame rate.
If you didn't give them permission, you can email them at '[email protected]' and tell them to take it down.